





The CANable 2.0 is a low cost open-source USB to CAN adapter that works with Linux, Mac, and Windows. The CANable 2.0 shows up as a virtual serial port on your computer and acts as a serial-line to CAN interface. Made in the USA!
Note: This is a beta unit, and you may need to update the device after purchasing to enable all features with the Cangaroo application.
Features
- Supports CAN2.0A and B, baud rates up to 1M
- Initial slcan support for CANFD (beta)
- Compatible with socketcan through slcand
-
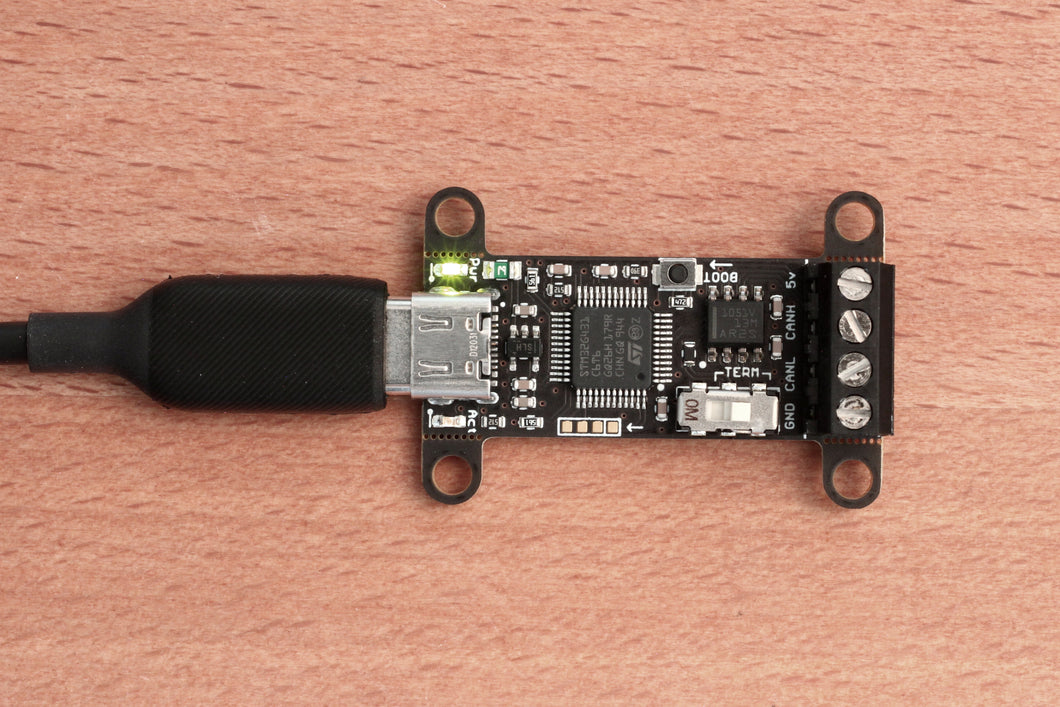
USB-C Connector
- 4-pin screw terminal with CANH, CANL, 5v (output only), and GND
- Button for entering bootloader
- Switch to enable/disable onboard termination
- Internal oscillator trimmed by USB communication
- Simple cross-platform Python library
Connecting to a vehicle via OBD2? You may want to purchase a pigtail cable.
Have a question or need volume ordering information? Contact us at support@canable.io.
If you're interested in purchasing larger quantities (>20), reach out to us at admin@openlightlabs.org to arrange for bulk orders at lower cost.
Product Details
On Linux the CANable 2.0 works natively with slcand, so you can use all of the standard can-utils command-line utilities and even Wireshark to interact with the bus.
On Windows and Linux, the CANable 2.0 works with Cangaroo. This is a simple application that shows CAN traffic in real-time and allows you to transmit messages on the bus, display aggregate traces, as well as decode messages from DBC files.
Python Support
For even more flexibility, the canard library allows you to directly talk to the CAN bus from Python. The library is cross-platform and can connect directly to a CANable 2.0's virtual serial port interface or native Linux socketcan interface. With only a couple lines of code you can decode traffic on the bus, send messages, and more.
Check out the getting started page for more information on getting your CANable 2.0 up and running.
Credits and Disclaimer
The CANable 2.0 is a low-cost open-source hardware tool. While I have full confidence that the CANable 2.0 will meet your needs, please do not use the CANable 2.0 in any mission-critical or life-threatening situations. I claim no responsibility for unacceptable use or damages. However, if you encounter a hardware or software issue with CANable 2.0, please let me know and I will do my best to resolve the problem as soon as I can!